
一、项目背景
在汽车制造中,车身的连接工艺对于整车的强度、安全性和质量至关重要。传统的焊接等连接方式存在一些局限性,如焊接可能导致热变形、对材料有一定限制等。
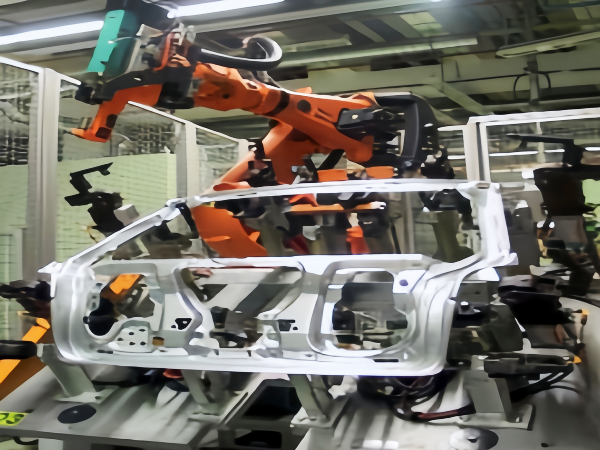
而铆接作为一种先进的连接技术,具有连接可靠、对材料损伤小、能适应不同材质连接等优点。随着汽车工业对生产效率和质量的要求不断提高,采用机器人进行车身铆接成为了一种高效且先进的解决方案。
二、项目目标
提高铆接质量
确保铆钉的安装精度和紧固力符合标准,使车身连接部位具有良好的强度和密封性。通过机器人精确的定位和施力控制,减少铆钉松动、错位等质量问题。
提升生产效率
机器人能够以高速、连续的方式进行铆接操作,相比人工铆接大大缩短生产时间。可以实现多工位同时作业,满足汽车生产线大规模、高效率的生产需求。
增强生产灵活性
能够快速适应不同车型、不同车身部位的铆接要求,通过编程调整机器人的动作和工艺参数,实现多品种、小批量的生产模式。
三、项目实施内容
机器人选型与布局
选择适合车身铆接任务的工业机器人,通常需要考虑机器人的负载能力、工作范围、精度等因素。例如,选用具有较大工作半径和较高精度的六轴机器人,以满足车身不同部位的铆接需求。
合理布局机器人工作站,要考虑生产线的空间限制、物料输送路径以及与其他生产设备的协同工作等因素。一般会采用多个机器人协同作业的方式,提高整体生产效率。
铆接设备集成
配备先进的铆接设备,如铆钉枪、铆钉送料系统等。铆钉枪要与机器人手臂进行连接和适配,确保在机器人的操作下能够准确地将铆钉安装到指定位置。
铆钉送料系统要保证铆钉的稳定供应和正确的输送方向,通常采用振动盘或其他自动送料装置,将铆钉有序地输送到铆钉枪。
编程与控制
通过专业的机器人编程软件,根据车身的设计图纸和铆接工艺要求,编写机器人的运动程序和铆接操作程序。包括机器人的运动轨迹、速度、施力大小等参数的设定。
采用先进的控制系统,实现对机器人和铆接设备的精确控制。例如,通过传感器反馈实时调整机器人的动作,确保铆接质量。控制系统还要具备故障诊断和安全保护功能,防止意外事故发生。
质量检测与监控
安装质量检测设备,如视觉检测系统、力传感器等,对铆接质量进行实时检测。视觉检测系统可以检查铆钉的安装位置是否准确、有无漏铆等情况;力传感器可以监测铆接过程中的施力情况,判断铆钉的紧固程度是否符合要求。
建立质量监控系统,对检测数据进行实时采集和分析。如果发现质量问题,能够及时报警并调整生产工艺,保证产品质量的稳定性。
四、项目预期效益
质量效益
显著提高车身铆接质量,减少因连接不良导致的车身强度不足、密封性差等问题,降低整车的质量风险,提高产品的可靠性和安全性。
经济效益
提高生产效率,降低人工成本。机器人可以 24 小时不间断工作,相比人工铆接,能够大幅减少生产时间和人力投入。同时,由于铆接质量的提高,减少了废品率和返工成本,整体经济效益显著提升。
技术效益
推动汽车制造工艺的技术升级,提升企业在行业中的竞争力。采用机器人铆接技术,使企业能够更好地适应汽车行业不断发展的需求,为未来的产品创新和生产优化奠定基础。
五、项目发展前景
随着汽车轻量化和智能化的发展趋势,对车身连接技术的要求将越来越高。车身铆接机器人工作站技术将不断完善和创新,例如开发更智能的编程算法,实现自适应铆接;采用新型的铆接材料和工艺,提高连接性能等。同时,该技术有望在其他领域如航空航天、轨道交通等的轻量化结构连接中得到推广应用,具有广阔的发展前景。
总之,车身铆接机器人工作站项目对于提高汽车制造质量和效率具有重要意义,是汽车工业向智能化、自动化生产发展的重要举措。

